RFID-Based Robot Navigation
In my 8th grade science fair project, I explored how RFID technology can be used to improve robot navigation algorithms. By matching a tag to the corresponding location on its map, a robot can identify its current position and plan a route to its destination. I represented the building map as a weighted graph, and used Dijkstra’s shortest path algorithm to find the optimal route.
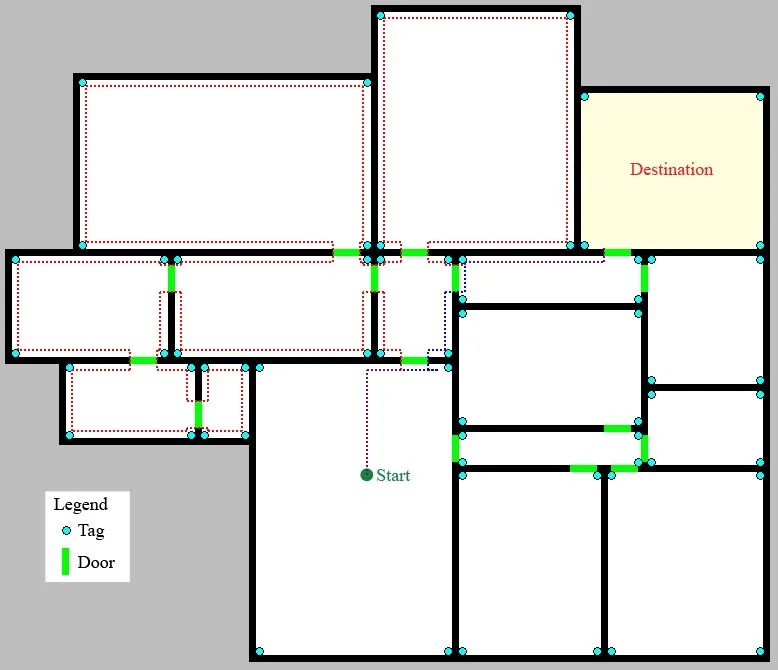
Robot simulation: the path of a robot using RFID-tag based navigation. The robot uses wall-following to encounter tags and doors. Upon reaching the first tag, it computes the route to its destination using routing algorithms.